 電子發(fā)燒友App
電子發(fā)燒友App


陀螺方位角


相關(guān)推薦
新型iMEMS角速率檢測陀螺儀
ADI公司的ADXRS150和ADXRS300陀螺儀的滿量程范圍為150°/s和300°/s,代表了陀螺儀技術(shù)的一次量子飛躍。作為首款帶有集成電子元件的商用表面微加工角速率傳感器,它們比任何具有類似
2023-06-17 15:21:43 491
491
491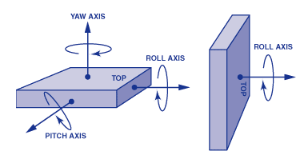
陀螺儀的工作原理 陀螺儀在航天航空中的應(yīng)用
陀螺儀,又叫角速度傳感器,是用高速回轉(zhuǎn)體的動量矩敏感殼體相對慣性空間繞正交于自轉(zhuǎn)軸的一個或二個軸的角運(yùn)動檢測裝置,同時,利用其他原理制成的角運(yùn)動檢測裝置起同樣功能的裝置也稱陀螺儀。
2023-01-05 16:42:242712
2712加速計陀螺儀測試設(shè)備
RTA適用于測試微機(jī)電系統(tǒng)加速度計和陀螺儀的多軸定位器系列。它們允許同時對多達(dá) 140 個器件進(jìn)行多站點(diǎn)測試,同時提供精確可靠的角位置、速率和加速度運(yùn)動。加速度計使用恒定速度,陀螺儀測試則采用正弦角
2022-09-26 16:52:21
影響地物光譜反射率變化的因素有哪些?
有很多因素會引起反射率的變化,如:太陽位置、傳感器位置、地理位置、地形、季節(jié)、氣候變化、地面濕度變化、地物本身的變異、大氣狀況等。 太陽位置主要是指太陽高度角和方位角,如果太陽髙度角和方位角不同,則
2022-08-12 10:42:557064
7064
點(diǎn)云數(shù)據(jù)的方位角歸一化方法
摘要:點(diǎn)云感知算法是安全魯棒的自動駕駛系統(tǒng)中尤為重要的一環(huán)。在CVPR 2022上,地平線-華中科技大學(xué)計算機(jī)視覺聯(lián)合實驗室發(fā)表了研究成果Azimuth Normalization——以點(diǎn)云特有的徑向?qū)ΨQ性作為先驗,對數(shù)據(jù)歸一化,降低從點(diǎn)云中獲取信息的難度。該歸一化方法能與大多數(shù)感知算法結(jié)合,降低對訓(xùn)練數(shù)據(jù)的需求并提升性能上限,在三維場景感知中有著廣泛的應(yīng)用價值。
2022-04-27 12:48:081495
1495二維波束寬度的測量方法有哪些
明確激光光束參數(shù)是激光工藝的基礎(chǔ)和前提。具體的參數(shù)包括光斑坐標(biāo),大小,方位角,橢圓度,光強(qiáng)等。
2022-04-26 15:30:27471
471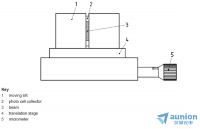
聊一聊4D雷達(dá)的方位角天線布局思考
今天咱們繼續(xù)回到好久沒講了的4D 雷達(dá),接著上次那篇(4D 雷達(dá)天線布局思考-俯仰角篇),這回聊聊方位角(Azimuth)。 之前提過,評估一個量可以從分辨率(resolution),精度
2021-06-17 15:24:112224
2224陀螺儀傳感器的分類_陀螺儀傳感器有什么用
陀螺儀傳感器可以全方位的感受空間上位移的變化維較少,最早應(yīng)用于航空、航天和航海等領(lǐng)域。隨著陀螺儀傳感器成本的下降,現(xiàn)在很多智能手機(jī)都集成有陀螺儀傳感器,那么陀螺儀傳感器在手機(jī)里有什么作用呢?下面小編為大家詳細(xì)的介紹一下。
2020-12-07 15:01:326989
6989如何使用波束實孔徑雷達(dá)圖像提升汽車?yán)走_(dá)方位角分辨率的成像方法
針對汽車?yán)走_(dá)方位角分辨率受方位向天線長度限制的問題, 該文提出一種基于多波束實孔徑雷達(dá)圖像融合來提升汽車?yán)走_(dá)方位角分辨率的成像方法。該方法首先利用相控陣天線波束電掃描來獲取前視實孔徑雷達(dá)圖像, 然后
2020-11-30 03:55:00 39
39
39如何提高汽車?yán)走_(dá)方位角的分辨率PDF文件講解
針對汽車?yán)走_(dá)方位角分辨率受方位向天線長度限制的問題, 該文提出一種基于多波束實孔徑雷達(dá)圖像融合來提升汽車?yán)走_(dá)方位角分辨率的成像方法。該方法首先利用相控陣天線波束電掃描來獲取前視實孔徑雷達(dá)圖像, 然后
2020-11-27 03:40:0027
27新款先進(jìn)雷達(dá)傳感器ARS540將整合賽靈思Zynq UltraScale+ MPSoC平臺
4D成像雷達(dá)ARS540先進(jìn)的16 nm技術(shù)提供了復(fù)雜信號處理所需要的高性能,可以探測物體的距離、方位角、仰角和相對速度,從而提供車輛周圍駕駛環(huán)境的詳細(xì)信息。早期的汽車?yán)走_(dá)系統(tǒng)只能捕捉物體的相對速度和方位角。
2020-10-09 14:33:454547
4547如何對天線下傾角和方位角調(diào)整進(jìn)行網(wǎng)絡(luò)優(yōu)化
天線下傾角和方位角的調(diào)整是網(wǎng)絡(luò)優(yōu)化中的一個非常重要的事情。根據(jù)理想的蜂窩移動通信模型,一個小區(qū)的交界處,這樣信號相對互補(bǔ)。與此相對應(yīng),在現(xiàn)行的GSM系統(tǒng)(主要指ERICSSON設(shè)備)中,定向站一般
2020-08-17 18:51:001
1航向陀螺儀的組成_航向陀螺儀的功能
航向陀螺儀(directiONalgyroscope)就是利用陀螺特性測量飛機(jī)航向的飛行儀表,測量飛機(jī)轉(zhuǎn)彎時航向角的變化。由于陀螺自轉(zhuǎn)軸不能自動跟蹤經(jīng)線,因此測量航向需要對自轉(zhuǎn)軸進(jìn)行校正,并使其穩(wěn)定在經(jīng)線方向上,航向指標(biāo)指示的角就是航向角。
2020-01-11 06:37:005982
5982尋北儀的價格分析與應(yīng)用介紹—慧聯(lián)科技
傾角及方位角。產(chǎn)品使用極低漂移的 MEMS 陀螺儀用于尋北,內(nèi)置IMU用于傾角測量及方位推算,具有體積小,價格低、功耗低、長壽命、高可靠的特點(diǎn)。? ? ? ? NF300 由MEMS陀螺儀、加速度計
2019-12-09 17:42:317836
7836關(guān)于從指定方向圖合成陣列優(yōu)化工作流程的分析
在隨后的代碼中,我們使用方位角和仰角旁瓣的總和。我們還增加了一個方位角和仰角旁瓣電平之間的絕對差值,以確保它們達(dá)到峰值時是接近的。因為優(yōu)化引擎可以最小化目標(biāo)函數(shù),所以每次迭代此函數(shù)時,Val 都為最小值。您可根據(jù)特定要求調(diào)整這些參數(shù)。
2019-09-11 17:12:161921
1921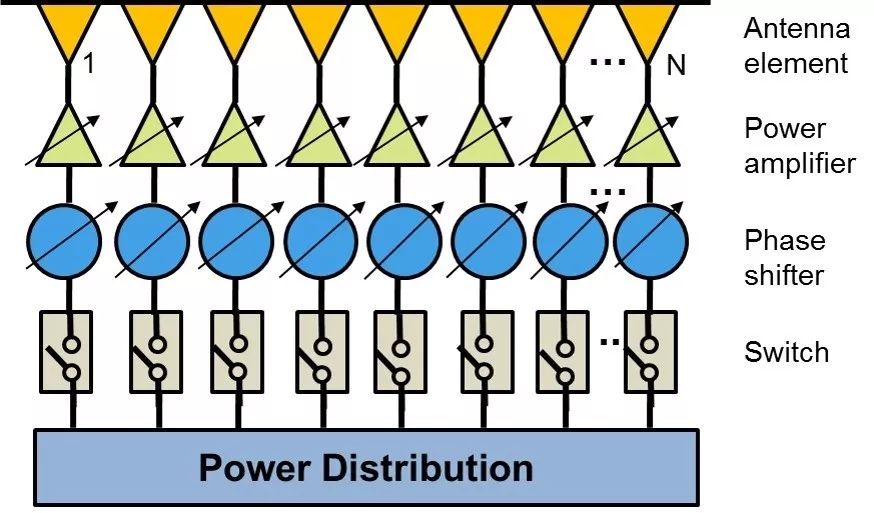
利用TMS320F2806型DSP實現(xiàn)太陽光線自動跟蹤控制系統(tǒng)的設(shè)計
太陽光線的入射角是時刻變化的,為使跟蹤裝置在不同季節(jié)、不同日照時間都能精確地捕捉太陽光線人射角,機(jī)械結(jié)構(gòu)采用雙軸跟蹤:利用高度角一方位角式全跟蹤,通過兩電機(jī)分別控制高度角軸與方位角軸位置,如圖1所示
2019-08-07 08:16:002448
2448
陀螺儀是什么
陀螺儀是用高速回轉(zhuǎn)體的動量矩敏感殼體相對慣性空間繞正交于自轉(zhuǎn)軸的一個或二個軸的角運(yùn)動檢測裝置。利用其他原理制成的角運(yùn)動檢測裝置起同樣功能的也稱陀螺儀。
2018-11-24 10:03:3730395
30395自制仰角方位角測試儀,Elevation Azimuth Tester
自制仰角方位角測試儀,Elevation Azimuth Tester
關(guān)鍵字:仰角測試儀,方位角測試儀制作
自制仰角方位角測試儀
2018-09-20 19:22:161289
1289利用FPGA開發(fā)的太陽能自動跟蹤系統(tǒng)設(shè)計
當(dāng)時間為正常光照時間時,太陽跟蹤系統(tǒng)每隔5 min就會進(jìn)入太陽高度角方位角進(jìn)行計算。計時模塊輸出給太陽高度角方位角模塊所需的時間信息,然后計算赤道坐標(biāo)系下的赤緯角和時角,最后計算高度角方位角坐標(biāo)系下
2018-08-26 09:45:09900
900在太陽能工作過程中傳感器的作用
太陽在天球上的位置可由太陽高度角和太陽方位角來確定。地球上觀測點(diǎn)同太陽中心連線與地平面的夾角,稱為太陽高度角;地球上觀測點(diǎn)同太陽中心連線在地平面上的投影與正南方向之間的夾角,稱為太陽方位角。太陽運(yùn)行
2018-06-11 10:14:0010347
10347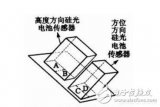
關(guān)于MSP430的圓感應(yīng)同步器方位測角系統(tǒng)
為了克服一般光學(xué)經(jīng)緯儀讀數(shù)不便 的弱點(diǎn) ,實現(xiàn)在不同轉(zhuǎn)速下對方位角的精確測量,設(shè)計 了基于M SP430 的圓感應(yīng)同步器方位測角系統(tǒng)。
2018-04-20 17:41:035
5多型號戰(zhàn)斗機(jī)角速率陀螺組件綜合檢測系統(tǒng)設(shè)計
戰(zhàn)斗機(jī)角速率陀螺組件(以下簡稱機(jī)載速率陀螺)是戰(zhàn)斗機(jī)軍械火控系統(tǒng)的重要組成部分,它能精確地測量戰(zhàn)斗機(jī)相對于慣性空間的方位、俯仰、橫滾3個角速度,并輸出相應(yīng)的電壓信號,傳輸給戰(zhàn)斗機(jī)軍械火控系統(tǒng)作為瞄準(zhǔn)
2018-04-09 09:37:170
0單軸MEMS角速率陀螺及三軸MEMS角速率陀螺
單軸硅微MEMS角速率陀螺PA-ARG系列 1. 單軸硅微MEMS角速率陀螺PA-ARG 簡介 : PA-ARG系列角速率傳感器(陀螺),由西安精準(zhǔn)測控自行研制,是用來測量角速率的無旋轉(zhuǎn)馬達(dá)的固態(tài)
2018-04-03 10:33:583090
3090
雙框架硅微型角振動陀螺儀再平衡控制方案研究
雙框架式角振動陀螺儀是利用振動質(zhì)量塊在被基座(儀表殼體)帶動旋轉(zhuǎn)時的哥氏效應(yīng)來測量角速度。雙框架硅微型角振動陀螺儀的結(jié)構(gòu)原理。陀螺儀由內(nèi)外框架組成,內(nèi)框架通過一對扁平狀撓性軸與外框架相連;外框架通過
2018-03-10 11:15:250
0改進(jìn)ESPRIT-like算法的相干源方向角估計
針對用于二維十字相控陣的類旋轉(zhuǎn)不變技術(shù)估計信號參數(shù)( ESPRIT-like)算法用于相干源方向角估計時存在仰角和方位角配對困難的問題,提出一種基于接收信號矩陣聯(lián)合對角化的改進(jìn)二維
2017-12-22 14:23:141
1基于天線下傾角和方位角調(diào)整的網(wǎng)絡(luò)優(yōu)化
天線下傾角和方位角的調(diào)整是網(wǎng)絡(luò)優(yōu)化中的一個非常重要的事情。根據(jù)理想的蜂窩移動通信模型,一個小區(qū)的交界處,這樣信號相對互補(bǔ)。與此相對應(yīng),在現(xiàn)行的GSM系統(tǒng)(主要指ERICSSON設(shè)備)中,定向站一般被
2017-12-07 14:15:022669
2669GPS北斗導(dǎo)航系統(tǒng)的選星算法研究
基于用戶對衛(wèi)星導(dǎo)航系統(tǒng)的定位精度和實時性要求不斷提高的目的,文中在CPS/北斗組合導(dǎo)航系統(tǒng)的基礎(chǔ)上,采用基于高度角和方位角的快速選星算法,利用STK軟件和MATLAB仿真通過對比最佳幾何誤差因子法
2017-11-02 16:14:542
2基于方位角和載荷聯(lián)合反饋的獨(dú)立變槳距控制策略研究
基于方位角和載荷聯(lián)合反饋的獨(dú)立變槳距控制策略研究_劉皓明,感興趣的小伙伴們可以瞧一瞧。
2016-09-20 17:34:440
0電子羅盤的方位角計算公式
磁阻傳感器為建立羅盤導(dǎo)航系統(tǒng)提供了固態(tài)有效的解決辦法!但是我們怎么才能夠從簡單的3 軸數(shù)據(jù)得到羅盤的方位角呢?下面就將一步步告訴你如何去實現(xiàn)!
2012-04-28 15:23:46264
264圓曲線坐標(biāo)計算程序_軟件工具
圓曲線坐標(biāo)計算程序_軟件工具【基本介紹】 可計算圓曲線帶有緩和曲線中、邊樁坐標(biāo)及切線方位角。 1、本軟件可計算圓曲線帶有緩和曲線中、邊樁坐標(biāo)及切線方位角,若只需計算圓曲
2012-02-26 19:55:0359
59基于DSP與FPGA的陀螺控制方法
針對在陀螺控制過程中陀螺基準(zhǔn)信號頻率和相位角測量不準(zhǔn)確,從而導(dǎo)致陀螺控制過程中定位不準(zhǔn)確,產(chǎn)生漂移的難題,研究了一種基于DSP + FPGA 的陀螺控制方法。利用FPGA 進(jìn)行基準(zhǔn)信號頻率
2011-09-13 14:30:1128
28MEMS陀螺儀的簡單校準(zhǔn)
傳統(tǒng)上,陀螺儀是用于測量旋轉(zhuǎn)角速率的機(jī)械器件,其常見用途之一就是在導(dǎo)航系統(tǒng)中估算方位角。在系統(tǒng)中安裝此類陀螺儀時,通常會涉及到艙壁安裝的機(jī)械設(shè)計,即機(jī)械定位螺絲系統(tǒng)
2011-08-25 17:27:25265
265一種雷達(dá)方位角檢測方法
介紹了一種雷達(dá)方位角測量的方法,該方法采用旋轉(zhuǎn)變壓器/軸角轉(zhuǎn)換器AD2S80BD,將旋轉(zhuǎn)變壓器輸出的模擬信號通過AD2S80BD 軸角轉(zhuǎn)換電路轉(zhuǎn)換成數(shù)字量信號,再利用單片機(jī)MSP430F123 進(jìn)行解
2011-05-12 17:23:1956
56PE-E500計算器自編BASIC程序
本程序集包含方位角計算,坐標(biāo)正算,坐標(biāo)反算,曲線要素及坐標(biāo),左右邊樁坐標(biāo)計算,新舊坐標(biāo)轉(zhuǎn)換。
2011-02-25 10:48:5030
30基于C8051F040的方位角測試系統(tǒng)
提出一種基于C8051F040的炮塔方位角測試系統(tǒng)的設(shè)計方案,給出測試系統(tǒng)的各個模塊軟硬件設(shè)計。炮塔方位角測試系統(tǒng)集數(shù)據(jù)采集,數(shù)據(jù)傳輸和數(shù)據(jù)顯示等功能于一體,實現(xiàn)了炮塔方
2010-12-24 16:21:2434
34方位角及傾斜角對太陽能電池板發(fā)電量的影響
1. 方位角
太陽電池方陣的方位角是方陣的垂直面與正南方向的夾角(向東偏設(shè)定為負(fù)角度,向西偏設(shè)定為正角度)。一般情況下,方陣朝向正南(即方陣垂直面與正南
2010-09-03 11:54:133761
3761基于AD2S82A的天線方位角的數(shù)字變換的設(shè)計
隨著現(xiàn)代計算機(jī)與數(shù)字技術(shù)的發(fā)展.這種顯示方式已不適合時代發(fā)展的要求。為了實現(xiàn)對雷達(dá)探測目標(biāo)的錄取、綜合、相關(guān)及顯示,為了實現(xiàn)設(shè)備的小型化,需要將天線的方位角變
2010-07-13 12:00:191037
1037
基于核相關(guān)濾波器的SAR車輛目標(biāo)檢測與識別
針對合成孔徑雷達(dá)(Synthetic Aperture Radar, SAR)目標(biāo)檢測與識別方法對目標(biāo)方位角敏感的問題,該文基于相關(guān)濾波器理論與核特征分析方法,提出一種對SAR 目標(biāo)方位角具有較強(qiáng)魯棒性的核
2009-11-18 14:29:2011
11基于C8051F040的炮塔方位角測試系統(tǒng)設(shè)計
基于C8051F040的炮塔方位角測試系統(tǒng)設(shè)計
1 引言
隨著軍事技術(shù)的發(fā)展,測試系統(tǒng)的信息化是實現(xiàn)我軍裝備現(xiàn)代化建設(shè)主要途徑,當(dāng)務(wù)之急應(yīng)該用高新技
2009-11-05 10:30:03722
722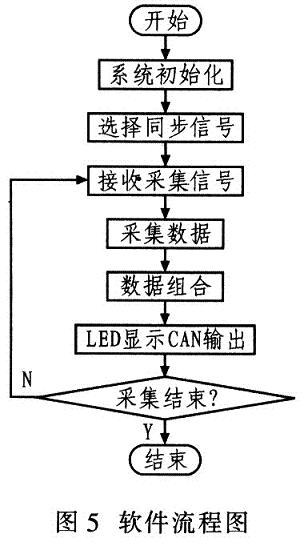
數(shù)顯方位測角儀誤差消除
為了準(zhǔn)確直觀的獲得方位角.克服光學(xué)經(jīng)緯儀湊數(shù)不便的弱點(diǎn),設(shè)計并實現(xiàn)了基于圓感應(yīng)同步器的經(jīng)緯儀方位測角系統(tǒng);用電子凌數(shù)取代了光學(xué)讀數(shù);根據(jù)圓感應(yīng)同步器及軸角變換
2009-07-07 14:33:5915
15什么是光纖陀螺
光纖陀螺的概念
光纖陀螺是一種非常重要的角速率傳感器件,具有壽命長、啟動快、精度高、耗電少、動態(tài)范圍寬等優(yōu)
2009-02-28 11:24:472893
2893導(dǎo)線測量內(nèi)業(yè)計算
導(dǎo)線測量的內(nèi)業(yè)計算1、坐標(biāo)方位角的推算2、坐標(biāo)正算公式3、坐標(biāo)反算公式
2008-06-23 19:29:0150
50衛(wèi)星天線焦距的調(diào)整
調(diào)整衛(wèi)星天線焦距的參數(shù)主要有方位角、仰角、極化角這三個參數(shù),其中
2006-04-16 20:04:312144
2144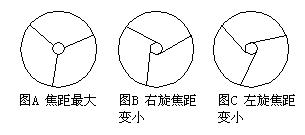



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論