2路16位的pwm��,12路12位以上的AD的嵌入式開發(fā)板有哪些����?
2017-11-16 21:31:34
PCA9685 - 16-channel, 12-bit PWM Fm I2C-bus LED controller - NXP Semiconductors
2022-11-04 17:22:44
PCA9685BS - 16-channel, 12-bit PWM Fm I2C-bus LED controller - NXP Semiconductors
2022-11-04 17:22:44
PCA9685PW - 16-channel, 12-bit PWM Fm I2C-bus LED controller - NXP Semiconductors
2022-11-04 17:22:44
PCA9685PW-Q900 - 16-channel, 12-bit PWM Fm I2C-bus LED controller - NXP Semiconductors
2022-11-04 17:22:44
PCA9685PW112
2023-03-29 21:51:51
PCA9685_10 - 16-channel, 12-bit PWM Fm I2C-bus LED controller - NXP Semiconductors
2022-11-04 17:22:44
1.癥狀:PCA9685工作的好好的突然不能工作了?芯片型號:單片機STC12C5A60S參數(shù):***it PCA9685_sda= P0^4; //數(shù)據(jù)輸入/輸出端
2022-02-18 07:56:03
舵機驅(qū)動板�,網(wǎng)上很多資源�,但是基于STM32F103的能用代碼實在太少。具體使用說明我覺得這兩個鏈接寫的夠詳細(xì)了��,附上鏈接1.PCA9685使用說明12.PCA9685使用說明2文字說明部分還可以�����,具體的計算過程以及代碼及代碼注釋請見下面鏈接。自己已經(jīng)跑過�����,沒有問題...
2021-08-11 06:03:25
在使用樹莓派控制舵機的時候����,由于樹莓派自帶的硬件PWM資源少�����,穩(wěn)定性差�����,所以買了塊PCA9685模塊���,芯片本身是比較簡單的,但是網(wǎng)上教程混亂��,互相抄襲����,看的云里霧里�����,無奈只好自己啃了一下
2021-07-29 06:42:34
PCA9685怎么使用�����?PCA9685擴展I/O的應(yīng)用是什么����?
2022-01-17 07:38:20
PCA9685是車規(guī)級的么��?我想要一個車規(guī)級的PWM輸出信號芯片(引腳越多越好)有沒有推薦�����。TLC5940-EP怎么樣
2021-05-24 09:43:54
PCA9685 16-Channel12-BitPWMLEDDimmer 特點16-LED驅(qū)動–On,Off,獨立的PWM控制4096步(12-bit)線性的可編程亮度可編程輸出延遲控制1MHzI2C總線。
2021-05-06 12:26:03
驅(qū)動4個KS3518和2個9g舵機(我用獨立電源)PCA9685原本用于LED控制亮度和閃爍的���,估計飛利浦公司都沒想到還能控制舵機,因為使用IIC總線通信���,所以編程比較容易�,只是有些地方容易卡住
2016-12-26 00:41:34
樹莓派控制16路PWM輸出的PCA9685模塊1.PCA96851.1簡介采用I2C通信���,內(nèi)置了PWM驅(qū)動器和一個時鐘,不需要不斷發(fā)送信號占用單片機資源支持16路PWM輸出��,每路12位分辨率
2022-01-11 06:34:39
pca9685用的是IIC通訊,如果用的是模擬的IIC����,需要加上拉電阻嗎?
2023-10-18 06:59:24
;i2c_bus %s for PCA9685 opened failed!", dev_name); goto __exit;}在前面加上reg = 0x80;后正常目前看來RISC-V來用以前的庫遇到很多坑,以前STM32正常的代碼沒有經(jīng)過新平臺的驗證���。
2023-01-11 15:00:54
pca9685芯片手冊 stm32 hal iic#ifndefpca9685#definepca9685#include"main.h"typedefstruct
2021-08-10 07:24:32
最近購買了一個PCA9685的舵機驅(qū)動板��,苦于沒有PCA9685的相關(guān)資料�����,不知哪位有相關(guān)資料可以share一下?多謝多謝�。
2016-08-13 22:29:23
開關(guān)通道輸出��,PCA9655E通過I2C總線和SMBus提供16位通用并行輸入和輸出(GPIO)擴展��。由于SPI可編程性���,單個硬件設(shè)置可支持多個系統(tǒng)配置�,以實現(xiàn)靈活的平臺解決方案方法
2019-09-23 08:47:14
=I2C2_MESSAGE_PENDING;uint16_t從設(shè)備地址=SLAVE_DEV_ADDRESS�;WriteData[0]=(MODE1>8)��;//PCA9685子地址WriteData[1
2019-07-22 11:08:58
I2C如何實現(xiàn)與PCA9685通信并且控制多個舵機���?
2022-01-17 08:05:14
PCA9685 伺服控制器/驅(qū)動器 電源管理 mikroBUS? Click? 平臺評估擴展板
2024-03-14 22:03:13
驅(qū)動是c++寫的,從 AdafruitPWMServoDriverLibrary 中移植過來(stm32f103c8t6)
2018-10-09 16:07:57
PCA9685 PWM DEMO BOARD
2024-03-14 23:16:12
�,通過協(xié)議來控制,用戶不需要編程���,只需要根據(jù)協(xié)議來設(shè)置即可實現(xiàn)程控精確控制PWM�����?����! ”竟?jié)以CH341+PCA9685為方案來制作一塊PCB電路板����,能夠?qū)崿F(xiàn)通過電腦直接操作IIC協(xié)議����,對PWM輸出
2023-03-27 11:35:23
Heloi嘗試在I2C中與PCA9685通信���,以生成PWM MPLAB X IDE V4.00和聲V2.05PIC32 MZ2048 EFH144PCA968,從和聲數(shù)據(jù)表(客戶端數(shù)據(jù)傳輸功能
2018-11-01 17:11:42
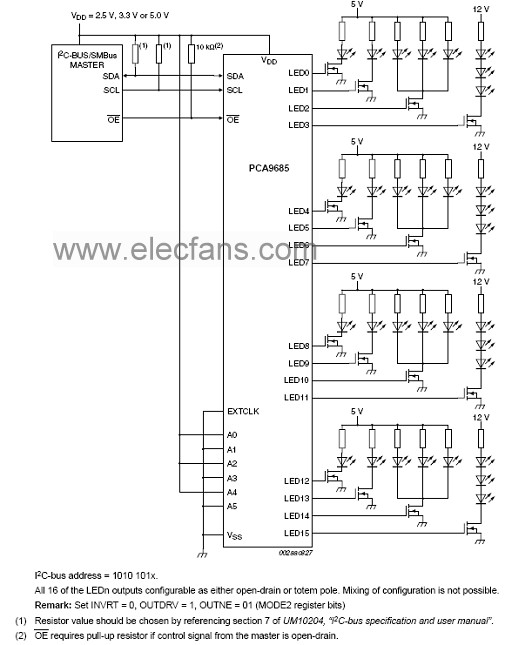
和 5V�。這些將把電源路由到任何需要的地方,包括樹莓派額外的 Adafruit 16 通道 12 位 PWM/伺服驅(qū)動器 - I2C 接口 - 需要 PCA9685
2022-06-27 07:03:36
之前在做假手的控制時��,驅(qū)動用的是舵機����。因為要實現(xiàn)假手的多自由度動作,所以需要用到8個舵機���。而我用的主控板只有兩路pwm輸出,不能滿足要求�,所以在查閱了相關(guān)資料后,找到了PCA9685模塊���。因為網(wǎng)上
2021-07-21 06:36:26
基于STM32F407探索者開發(fā)板的MPU6050陀螺儀姿態(tài)控制舵機程序第四篇:最簡單DIY基于STM32F407探索者開發(fā)板和PCA9685舵機控制模塊的紅外遙控機械臂控制程序第五篇:注釋最詳細(xì)�����、代碼最簡單
2021-11-26 08:23:27
首先聲明我寫的代碼主要參考了這位仁兄的���,非常感謝他把自己的源代碼奉獻出來�。他的代碼是基于標(biāo)準(zhǔn)庫函數(shù)的����,代碼過程簡單明了,非常適合移植�����。STM32 使用 PCA9685 控制舵機�����,控制機械臂����,控制
2022-02-21 06:19:16
一、PCA9695的I2C地址二����、PCA9685的寄存器學(xué)習(xí)寄存器模式:MODE1、MODE2脈寬(占空比)設(shè)置寄存器:LED0_ON_L����、LED0_ON_H、LED
2022-05-11 14:31:59
void SM_Write(u8 addr,u8 dat){//u8 err = 0;I2C_Start();I2C_write_data(PCA9685
2017-03-03 20:17:54
8路舵機都可控制��,在買pca9685驅(qū)動之前寫的一部分,只用了2個定時器���,如果只用舵機還可以接受��,否則太懶費資源���, stm32調(diào)試舵機8路全用定時器(庫函數(shù)) 單片機源程序如下: #include
2018-07-04 01:16:22
PCA9685 是最常見的多路PWM控制器,最高可以輸出16路12位分辨率的PWM���,可以用來控制LED或者舵機����。這里我們著重講解下如何控制舵機���。舵機控制假設(shè)舵機為50HZ的控制頻率,脈寬為0.5ms
2022-11-14 22:52:15
嗯���,這塊芯片就是PCA9685���,是飛利浦公司的一塊可獨立輸出不同占空比的芯片,好像可以同時輸出16路因為這芯片的手冊是英文的...作為一個大三理工男�,表示英文對我來說毫(ya)無(li)壓(shan
2016-08-29 22:45:53
IO口數(shù)量不夠����,本次調(diào)試pwm模塊pca9685拓展����,支持16路pwm,我直接從x寶買了塊模塊��,商家沒技術(shù)支持�。本章包括硬件搭建、驅(qū)動編寫和測試程序編寫�����。硬件準(zhǔn)備 連接設(shè)備至na...
2021-07-08 06:34:50
PCA9685_adrr 0x80//1+A5+A4+A3+A2+A1+A0+w/r //片選地址��,將焊接點置1可改變地址�����,//當(dāng)IIC總線上有多片PCA9685或相同地址時才需焊接#define
2018-03-28 20:40:27
一�、思路整理之前插入的是i2c的第四條總線,所以需要在設(shè)備樹中的I2C-4節(jié)點中增加pca9685節(jié)點�。需要編寫一個i2c_client的驅(qū)動,使得設(shè)備能夠被檢測到并且注冊進內(nèi)核。需要編寫一個
2022-05-11 10:52:09
LED驅(qū)動芯片的護欄燈解決方案���。該方案主要由以下幾部分組成:(1)以STC11F02單片機為主的主控電路���,其主要功能是產(chǎn)生SPI控制信號;(2)以LN0134為核心的LED驅(qū)動電路��,其主要功能利用它的16
2019-05-15 10:57:11
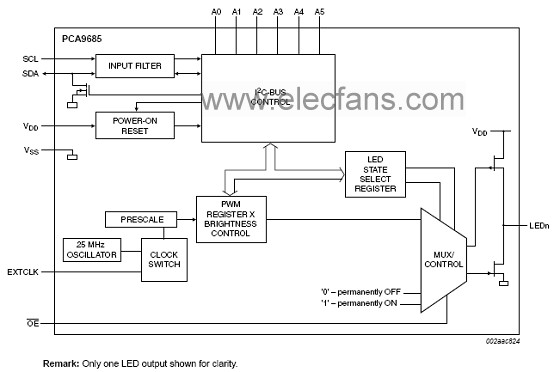
飛利浦很早出的PCA9685驅(qū)動模塊���!圖4 PCA9685實物圖圖5 PCA9685 功能框圖PCA9685是一款I(lǐng)2C總線接口的16位LED控制器�����,該控制器特別為紅/綠/藍/琥珀(RGBA)色的混合
2018-09-25 16:08:19
5.1.1的源碼里面����,是不會生成pwm那個節(jié)點的���,所以這部分需要我們自己添加���,這部分可以參考:https://lwn.net/Articles/553755/接下來就是pca9685的驅(qū)動了:static
2018-09-25 16:45:07
���?�! ?b class="flag-6" style="color: red">PCA9633是四路LED驅(qū)動器����,且每路可驅(qū)動最大25mA電流,并根據(jù)封裝的不同提供了可選的固定I2C地址和帶4位或7位硬件可編硬件地址(圖1)�����?��! D1:PCA9633引腳及內(nèi)部結(jié)構(gòu)示意圖 從
2019-06-05 05:00:15
板加個很貴����,且資料不開源�����,(圖1.1)最多支持你根據(jù)他的協(xié)議自己寫串口控制程序���。另一種是基于IIC協(xié)議的PCA9685芯片的舵機控制板���。該控制板價格不算太貴����,但是并沒有控制芯片����,所有的控制邏輯都需要在自己
2022-12-20 16:39:48
只需調(diào)試PWM占空比,引腳在P1^3���,P1^4.void pwminit(){CCON=0;//PCA初始化CL=0;//PCA的16位計數(shù)器低八位CH=0;//PCA的16位計數(shù)器高八位CMOD
2019-04-26 04:56:46
;); Serial.println(read8(PCA9685_MODE1), HEX);}void setPWM(u8 num, u16 on, u16 off) {//Serial.print("
2017-04-04 14:36:44
ADC采集光敏電阻值(DMA方式)通過四路adc采集四個方向上光敏電阻的值�����,我這里的分布是左上左下右上右下���。計算輸出的PWM通過計算得到兩路pwm通過PCA9685舵機驅(qū)動板驅(qū)動舵機通過控制PCA9685舵機驅(qū)動板驅(qū)動兩路舵機...
2022-01-24 08:12:32
-----pca9685,它是通過i2c控制的16通道pwm發(fā)生器,這足夠滿足控制要求了�。圖 組裝好的機械手臂圖 pca9685圖 接線圖 到這里硬件準(zhǔn)備才算真正的完成了,有的時候很多硬件都是在做的時候為了使功能
2018-09-25 16:49:48
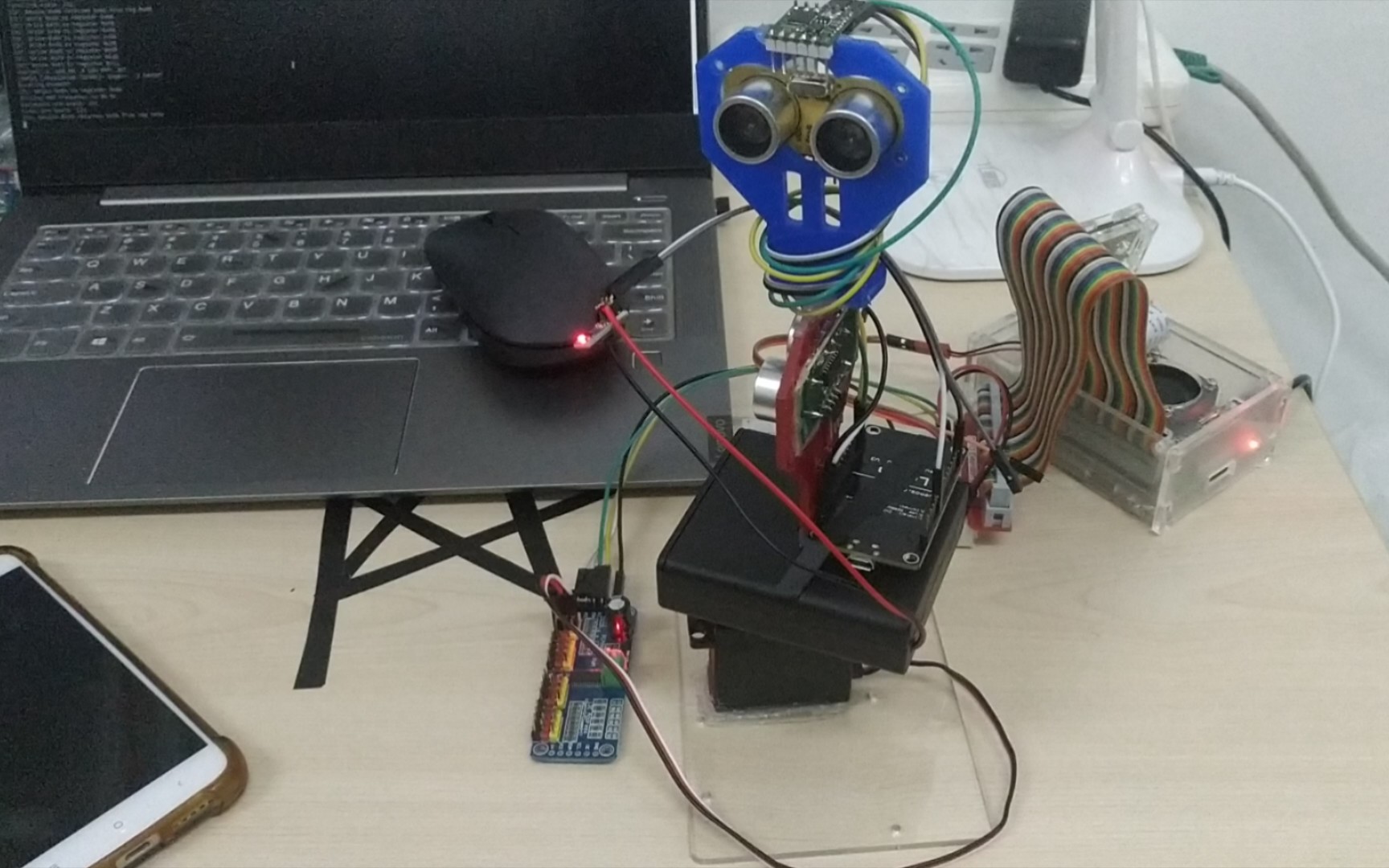
使用OpenMV3 M7攝像頭實現(xiàn)視覺追蹤與距離檢測,使用TB6612FNG模塊驅(qū)動兩路直流電機,使用16路舵機驅(qū)動板PCA9685驅(qū)動三路180度s90 舵機的機械臂,實現(xiàn)目標(biāo)物體的抓取��。
2023-09-25 06:32:43
的教程���,在動手中學(xué)習(xí)理論����。單片機型號:stm32f103c8t6使用stm32來控制一個舵機并不是難事���,但是如果控制多個舵機���,那硬件資源就顯得捉襟見肘了。因此����,必須使用神器,PCA9685了���,相信你能主動上網(wǎng)搜索PCA9685�����,也一定知道PCA9685是多牛了��,我就不去轉(zhuǎn)述了��。老規(guī)矩��,將源碼呈上
2021-09-02 08:08:12
怎樣去編寫i2c驅(qū)動的函數(shù)����?如何用PCA9685去完成無刷電機的驅(qū)動方法?
2021-07-21 07:02:10
一直在用NXP的單片機做各種開發(fā)���, 最近遇到了這么個問題��,就是單片機的PWM端口不夠用�,公司硬件工程師推薦使用NXP的PCA9685芯片擴展���,一個芯片可以擴展出16路PWM���,我們用了兩個,成功擴展
2021-11-23 08:14:50
PCA9685的寄存器可分為哪幾種類型����?怎樣使用PCA9685模塊去控制舵機呢?
2021-10-25 08:46:44
一���、材料清單樹莓派3B+MPU6050PCA9685擴展板(輸出16路pwm)一個舵機面包板��、GPIO擴展板(可有可無����,只是方便接在面包板上)二、電路接線PCA9685和樹莓派的接線
2021-07-05 07:32:36
PWM輸出信號芯片類似于PCA9685這種��,引腳越多越好��,需要是車規(guī)級���。繼電器控制輸出芯片類似于TLE6244X這種�,也需要是車規(guī)級�����,急需�,感謝大家
2021-05-25 15:31:03
80個LED陣列參考設(shè)計���,5個STP16CPS05 LED驅(qū)動器�,16路輸出由ST7Lite09微控制器控制
2019-09-04 08:46:14
請問PCA9685如何通過IIC協(xié)議控制多個舵機�����?
2021-10-27 06:11:19
大家有用過舵機控制器的嗎 pca9685能否給個驅(qū)動程序 求助大神還有51驅(qū)動多路舵機除了用舵機控制器還能怎么辦還可以用什么模塊呢
2019-08-12 00:27:27
,后退,左轉(zhuǎn),右轉(zhuǎn),趴下等功能, 后期將會支持強化學(xué)習(xí). 配套教程包括:openharmony環(huán)境搭建gpio控制PWM控制舵機控制PCA9685控制M
2022-04-22 15:57:47
The PCA9685 is an I2C-bus controlled 16-channel LED controller optimized for LCDRed/Green/Blue
2010-03-08 15:40:15 179
179 PCA9635是一款通過I2C總線控制的16位LED驅(qū)動器���,該驅(qū)動器特別為紅/綠/藍/琥珀(RGBA)色的混合應(yīng)用進行了優(yōu)化
2010-03-08 15:47:4142 PCA9625是一款I(lǐng)2C總線控制的16位LED驅(qū)動器����,主要應(yīng)用于電流為100mA的紅/綠/藍/琥珀(RGBA)LED亮度和閃爍的控制�,每個LED由獨立的8位分辨率(256級)的固定頻率PWM控制器控制輸出。PWM控
2010-03-08 16:08:5615 PCA9622是一款帶I2C總線的16位LED的電壓開關(guān)優(yōu)化的LED驅(qū)動器�����,它主要應(yīng)用于電流為100mA 的紅/綠/藍/琥珀(RGBA)的LED的亮度和閃爍的控制���,每個LED輸出均有獨立的8位分辨率(256個梯度)
2010-03-09 14:20:1513 PCA9625是一款I(lǐng)2C總線控制的16位LED驅(qū)動器���,主要應(yīng)用于電流為100mA的紅/綠/藍/琥珀(RGBA)LED亮度和閃爍的控制�,每個LED由獨立的8位分辨率(256級)的固定頻率PWM控制器控制輸出�����。PWM控
2010-03-09 14:22:1412 PCA9552是一款16位I2C總線接口的閃光器�,LED的閃爍速度可軟件編程控制
2010-03-09 14:38:3420 本應(yīng)用筆記討論了MR16及類似換代燈的LED驅(qū)動方案,電路采用12VAC輸入驅(qū)動LED����。該方案可配合磁變壓器和電子變壓器工作��,具有調(diào)
2010-11-05 21:41:44 3485
3485 PCA9685
2017-04-05 11:38:020 用Arduino類庫驅(qū)動舵機并不是一件難事�����,如果需要驅(qū)動很多電機�,就需要要占用更多的引腳,也會影響到Arduino的處理能力�����。專門的舵機驅(qū)動板很好的解決了這個問題���。此舵機驅(qū)動板使用PCA9685芯片
2017-11-19 09:42:5530444 這是一個采用i2c通信 ���,內(nèi)置了PWM驅(qū)動器和一個時鐘����。這意味著���,這將和TLC5940系列有很大不同���。你不需要不斷發(fā)送信號占用你的單片機!它是5V的兼容�����,這意味著你還可以用3.3V單片機控制并且
2017-11-19 10:15:5865010 本文檔的主要內(nèi)容詳細(xì)介紹的是16路PWM輸出的PCA9685模塊進行I2C通信的工程文件免費下載����。
2019-10-09 08:00:0038 我是專為樹莓派設(shè)計的兩自由度云臺擴展板,板載PCA9685芯片和TSL2581環(huán)境光傳感器�,通過I2C接口控制即可實現(xiàn)云臺轉(zhuǎn)動和光強檢測。
2019-11-11 14:24:463077 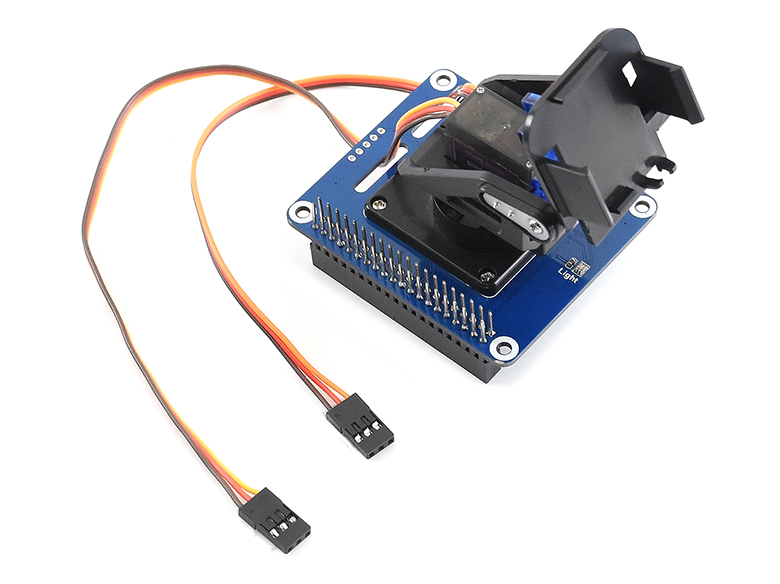
JetBot 小車使用的電機驅(qū)動模塊上用了 PCA9685 擴展 I/O ����,一邊與主控通過 I2C 總線通信,另一邊連接 TB6612 馬達驅(qū)動芯片。
2020-09-26 09:49:5218679 基于STM32f103的機器人控制核心板,包含8路舵機�����,4路電機��,4路串口���,1路藍牙,4路拓展IO口���,A4950驅(qū)動電機�����,最高支持5V5A的舵機驅(qū)動���,利用PCA9685輸出PWM信號�����,僅支持SWD
2020-12-07 09:53:573255 View the reference design for PCA9685_Typical Application. http://www.ttokpm.com/soft/ has
2021-07-11 15:39:0811 PCA9685與 NXP1768單片機iic通信�����,擴展PWM端口���。已調(diào)試成功����。
2021-11-15 10:51:0711 基于51單片機的舵機控制器第五篇:最簡單DIY基于藍牙、51單片機和舵機的鋼鐵愛國者機關(guān)槍控制器第六篇:最簡單DIY基于Android系統(tǒng)的萬能藍牙設(shè)備智能遙控器第七篇:最簡單DIY基于51單片機��、PCA9685、IIC���、云臺的舵機集群控制程序文章目錄51單片機物聯(lián)網(wǎng)智能小車系列
2021-11-23 16:20:5218 /109680769#include <Wire.h> //16路舵機控制板頭文件(pca9685)#include <Adafruit_PWMServoDriver.h> //16路舵機控制板頭文件Adafruit_PWMServoDriver pwm =
2021-12-16 16:52:0212 1.癥狀:PCA9685工作的好好的突然不能工作了?芯片型號:單片機STC12C5A60S參數(shù):sbit PCA9685_sda = P0^4; //數(shù)據(jù)輸入/輸出
2021-12-23 19:14:258 首先聲明我寫的代碼主要參考了這位仁兄的,非常感謝他把自己的源代碼奉獻出來���。他的代碼是基于標(biāo)準(zhǔn)庫函數(shù)的�����,代碼過程簡單明了,非常適合移植����。STM32 使用 PCA9685 控制舵機,控制機械臂���,控制
2021-12-24 19:27:2729 背景介紹:上一篇《看 Sugar 如何說 I2C 通信》中 Sugar 從硬件角度說了 I2C 總線���,其實就是在為這一篇打個基礎(chǔ)���。JetBot 小車使用的電機驅(qū)動模塊上用了 PCA968...
2022-01-18 11:11:343 使用STM32F103控制PCA9685芯片,驅(qū)動16路舵機����,可正反轉(zhuǎn),可精準(zhǔn)控制��,可調(diào)速度
2022-05-27 16:28:3733 用微控制器代替PCA9685 PWM發(fā)生器��。之前版本采用PCA9685芯片產(chǎn)生PWM,但其每個通道的頻率不能獨立控制,給馬達和舵機帶來問題���。Navio2采用微控制器代替,可以按組設(shè)置每個輸出通道的頻率,解決這個問題��。
2023-06-02 17:06:41734 
產(chǎn)品簡介:VK16D32是一種恒流數(shù)碼管或點陣LED驅(qū)動控制專用芯片�,內(nèi)部集成有數(shù)據(jù)鎖存器��、LED 恒流驅(qū)動模塊等電路?���?梢酝ㄟ^寄存器配置,調(diào)節(jié)掃描的位數(shù)���,從而獲得更大的單點驅(qū)動電 流���。數(shù)據(jù)通
2023-09-13 09:10:11543 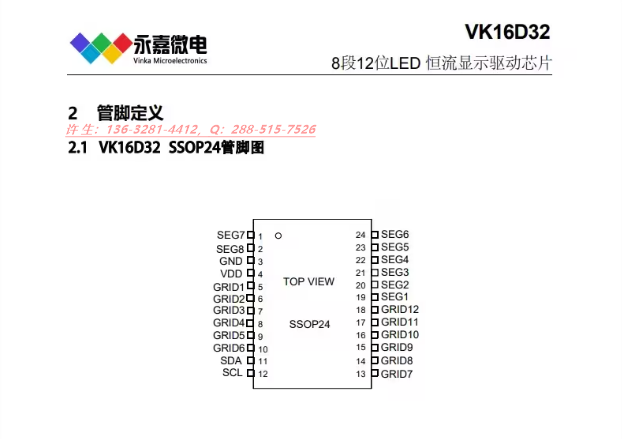
 電子發(fā)燒友App
電子發(fā)燒友App







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論